05. SLAM Testing
SLAM Testing
The next task of this project is to autonomously map the environment you designed earlier with the Building Editor in Gazebo. But before you tackle autonomous mapping, it’s important to test if you are able to manually perform SLAM by teleoperating your robot. The goal of this step is to manually test SLAM.
Write a shell script
test_slam.sh
that will deploy a turtlebot inside your environment, control it with keyboard commands, interface it with a SLAM package, and visualize the map in
rviz
. We will be using turtlebot for this project but feel free to use your personalized robot to make your project stand out!
SLAM Testing Task List
Task Description:
To manually test SLAM, create a
test_slam.sh
shell script that launches these files:
Task Feedback:
Nice job building your SLAM testing script!
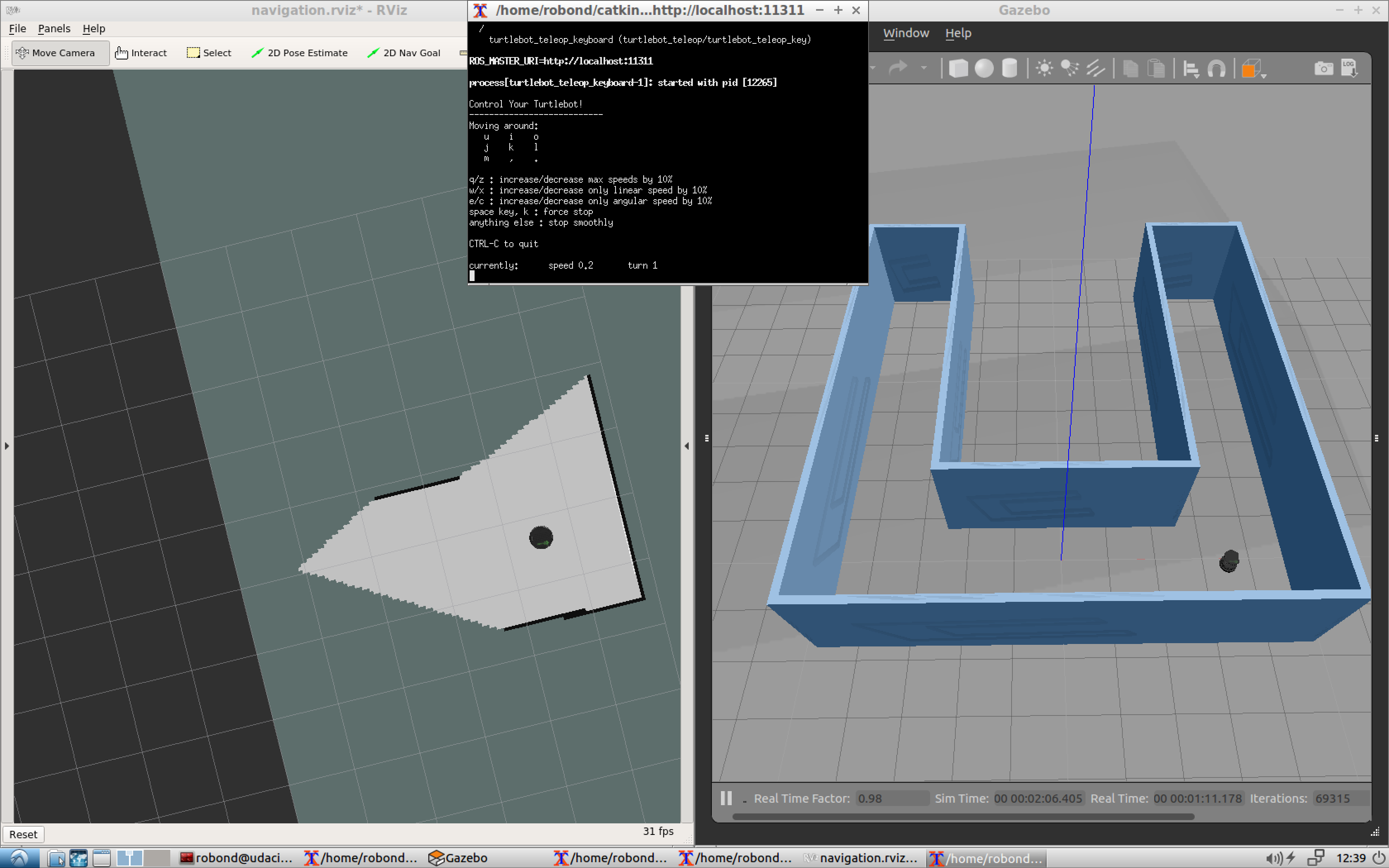
Run and Test
Launch your test_slam.sh file, search for the
xterminal
running the
keyboard_teleop
node, and start controlling your robot. You are not required to fully map your environment but just make sure everything is working fine. You might notice that the map is low quality, but don’t worry about that for now. If everything seems to be working fine, move on to the next concept!